
OPENCNC-J 📖ENGLISH_README
- 简介
- 这是一个基于Linuxcnc的开源整合项目, 目的为让电气工程师能更方便的使用Linuxcnc + ethercat与CIA402协议 + 树莓派(或X86 - Debian)的开发组合
- 当前版本 - 希望有更多的开发者加入
- 0.1.0
- 个人的视频发布主页 - 详细的项目内容
- 注意 & 警告!!!
- 此项目为开源项目, 不提供任何保障, 不提供任何赔付, 项目中涉及电气安全警告, 请自行负责
- 此项目遵循GPL-3.0开源协议
安装说明 - 以树莓派安装为例
安装Linuxcnc
- 下载官方安装包 - LinuxCNC 2.9.1Raspberry Pi OS based on Debian 12 Bookworm
- 制作SD卡系统 - 建议使用树莓派官方的SD卡系统制作工具Windows版本 &Ubuntu版本
- 插卡启动树莓派
- 配置Linuxcnc - [留白]
安装依赖包 - 参考安装ethercat范例, CIA402
- ethercat安装
- 打开terminal:
sudo apt install ethercat-master libethercat-dev linuxcnc-ethercat - 如果安装失败,请参考范例
报错后的安装方法
安装工具
sudo apt install geany curl git grub-customizer获取GPG KEY
sudo mkdir -p /usr/local/share/keyrings/wget -O- https://build.opensuse.org/projects/science:EtherLab/signing_keys/download?kind=gpg | gpg --dearmor | sudo dd of=/usr/local/share/keyrings/science_EtherLab.gpg创建ethercat源文件
sudo geany /etc/apt/sources.list.d/science_EtherLab.sources粘贴入下面代码
Types: debSigned-By: /usr/local/share/keyrings/science_EtherLab.gpgSuites: ./URIs: http://download.opensuse.org/repositories/science:/EtherLab/Debian_12/terminal输入
sudo apt update安装ethercat master
sudo apt install -y linux-headers-$(uname -r)sudo apt install ethercat-master libethercat-dev安装库和驱动
curl -s https://packagecloud.io/install/repositories/rodw-au/rodw-au/script.deb.sh | sudo bashsudo apt install linuxcnc-ethercat=0.9.4sudo apt update - 查看网口的MAC地址:
ip a- 记录MAC地址例如:
xx:aa:yy:zz:bb:cc
- 记录MAC地址例如:
- 输入(配置)到ethercat.conf文件
sudo geany /etc/ethercat.conf- 用geany修改文件
MASTER0_DEVICE="xx:aa:yy:zz:bb:cc"- 替换为你刚才获取的MAC地址DEVICE_MODULES="generic"
- 将ethercat服务设置为开机启动
sudo systemctl enable ethercat.servicesudo systemctl start ethercat.servicesudo systemctl status ethercat.servicesudo chmod 666 /dev/EtherCAT0- ethercat测试命令
ethercat slaves- 看看是否报错, 确认安装成功- 重启
- 打开terminal:
- 安装CIA402
- 回到用户目录:
cd git clone https://github.com/dbraun1981/hal-cia402- 如果报错请确认是否已经安装git工具sudo apt install git- git安装命令
- 进入hal-cia402文件夹:
cd hal-cia402 - 编译安装402工具包:
sudo halcompile --install cia402.comp
- 回到用户目录:
至此完成最困难的部分👍
驱动器参数设置
- 启动时显示AL221报警[编码器未回零]
- 设置零点: 点击驱动器面板操作 → 切换到[AF.CEN] → 按S → 再按S → 设置成功 #参照驱动器说明书 P39 - 4.3.3 绝对值操作
- 电机换向
- 如遇到电机方向不对, 可切换电机方向
- 设置方法: 修改参数P1.01 = 1 或 0
- 如遇到电机方向不对, 可切换电机方向
- 电子齿轮比
- 电子齿轮比分子P3.08 电子齿轮比分母P3.10
目录构成
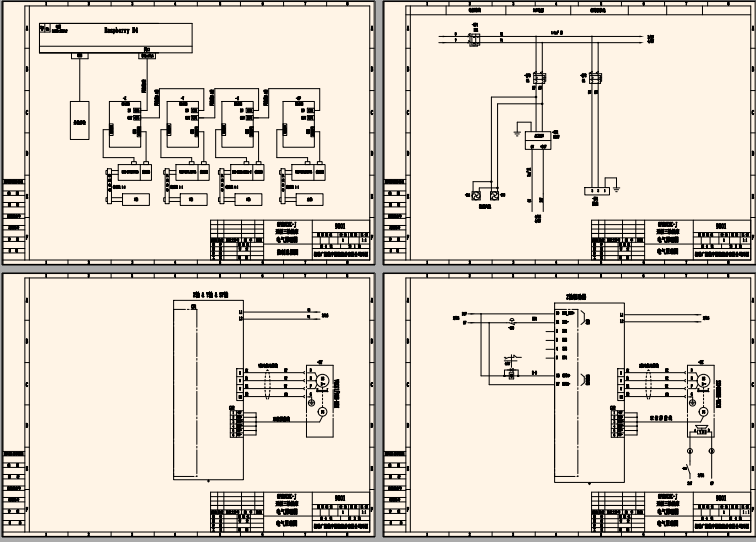
- CAD - 电气原理图
- linuxcnc - 包含了所需的所有配置文件

项目采购清单
声明: 与采购链接无商业关系, 请自行询价比价
| 采购物品 | 网址 | 型号 | 数量 | 备注 |
|---|---|---|---|---|
| XY轴电机+驱动 | URL | (新款)400W伺服+驱动+5米线 电机型号: RSM-M06L1330A(无抱闸) |
2 | 多圈编码器 绝对原点,这个是要加钱的 ,5米线 ,支持EtherCAT+CIA402 |
| Z轴电机+驱动 | URL | (新款)RS400E伺服+驱动+5米线 电机型号: RSM-M06L1330A-Z(带抱闸) |
1 | 多圈编码器 绝对原点,这个是要加钱的 ,5米线 ,支持EtherCAT+CIA402 |
| 主轴电机+驱动 | URL | (新款)RS400E伺服+驱动+5米线 电机型号: RSM-M06J1330A(无抱闸) |
1 | 普通编码器 ,5米线 ,支持EtherCAT+CIA402 |
| 树莓派_4代开发板 | URL | Pi 4B/8G[不可或缺套餐] | 1 | |
| micro hdmi转hdmi线 | URL | 3米 | 1 | |
| EtherCat伺服总线 | URL | 高柔性千兆屏蔽网线-绿色 | 3(0.5米) 1(1.5米) |
- |
| 树莓派_导轨盒 | URL | 1 | ||
| 显示器带壳 | URL | 7寸1024*600IPS+触摸+外壳 | 1 | 不推荐, 使用1个月不到就坏了,请自行选购 |
| 显示器支架 | URL | 1 | ||
| 手轮 | URL | MACH3有线手轮4轴 | 1 | |
| 导轨插座 | URL | 5孔 | 1 | |
| USB线 | URL | Micro usb数据连接线黑色 5米 | 1 | |
| 轴流风机 | URL | 阻燃ZL-803+12038风机 AC220V+防护网 | 2 | |
| 急停按钮 | URL | |||
| 断路器(施耐德) | IC65N-C10A/2P 10A IC65N-C6A/2P 6A |
1 2 |
请自行选购 | |
| 24V直流电源 | 明伟电源, 120瓦 | 1 | 请自行选购 |
特别感谢
-
感谢桂林广陆数字测控有限公司对此开源项目的支持
- 天猫旗舰店 - 产品购买地址

- 天猫旗舰店 - 产品购买地址
-
感谢在开发过程中帮助过我的开发者们Hakan & rodw & garlicbread
-
项目引用
